HUD:挡风玻璃上的透明仪表盘
HUD:挡风玻璃上的透明仪表盘
根据世界卫生组织的统计,全球每年约有130万人死于交通事故,其中94%是由人为失误造成的。在城市道路上,以65公里的时速行驶时,驾驶员低头看仪表盘1-3秒,相当于盲开18-54米。触目惊心的数据背后,是传统的汽车信息显示方式与安全驾驶之间存在着天然的矛盾。
如果关键的驾驶信息能够"悬浮"在前方道路上,让驾驶员不必移开视线就能看到车速、导航指示,甚至是前方障碍物警告,会怎样?这就是抬头显示器(Head-Up Display,简称HUD)。

这项技术的故事要从1960年的军用航空说起。当时的战斗机飞行员面临着一个生死攸关的问题:在高速飞行和激烈战斗中,哪怕低头看仪表一秒钟,都可能错失战机或陷入危险。于是,工程师们将关键信息投射到飞行员正前方的透明屏幕上,这就是HUD的前身。1988年,通用汽车收购休斯航天公司后,首次将这项军用技术引入民用汽车,推出了第一款配备HUD的量产车型--Oldsmobile Cutlass Supreme Indy 500 Pace Car,一款专为纪念印第安纳波利斯500英里大赛而打造的特别版轿车。但它的HUD系统还相当原始,只能在挡风玻璃上显示简单的数字车速,显示区域也仅有巴掌大小。
然而,早期的汽车HUD远没有今天这般先进。它们面临着诸多技术挑战,例如显示亮度不足、在强光下几乎看不清;显示内容单一,通常只有车速,且由于成本过于高昂,使其长期局限于豪华车型,这种局面一直持续到21世纪初。几项关键技术的突破彻底改变了HUD的命运:
首先是显示技术的革命。随着手机和平板电脑的普及,LCD和LED技术实现了质的飞跃,不仅亮度大幅提升,成本也急剧下降。一块车规级LCD显示屏的价格从上千美元降到了几百美元。

而更关键的是汽车电子架构的进化。在1990年代,汽车内部的电子系统就像是各自为政的信息孤岛。速度传感器归仪表盘管,发动机数据归发动机控制单元管。如果HUD想要显示车速,就需要从速度传感器单独拉一根线;想显示转速,又得接入转速表信号;想显示导航信息,还得想办法和导航系统对话。而21世纪初,一项技术改变了这一切——CAN总线(Controller Area Network,控制器局域网络)。这项技术最初是为了解决汽车线束过于复杂的问题,却意外地为HUD的普及铺平了道路。CAN总线就像是给整栋楼装了一套内部网络。所有设备都连接到这个网络上,任何信息都可以通过统一的语言在网络中传输。这意味着HUD系统只需要接入CAN总线这一根网线,就能获取整车的几乎所有信息。而且这些数据都是标准化的,CAN总线上的数据有统一的格式,一家HUD供应商开发的产品,可以相对容易地适配不同品牌、不同型号的汽车。
随着技术的进一步发展,汽车的电子架构也在不断进化。从最初的CAN总线,到后来的FlexRay(更高速)、MOST(多媒体专用)、以太网(超高速),汽车内部的信息高速公路越修越宽。到了2010年代,一辆普通家用车内部的数据传输速度已经可以达到100Mbps以上,足以支持高清视频的实时传输。
正是在这样的背景下,HUD技术迎来了快速发展期,并逐渐形成了三个清晰的发展阶段:
第一代:C-HUD(组合式HUD)
这代HUD的核心是一块倾斜安装在仪表台上的半透明树脂板,本质上就是一面半反半透的镜子。其工作原理相当简单:仪表台内的小型投影仪向上投射图像,经过这块倾斜的透明板反射后进入驾驶员的眼睛。就像在玻璃窗上既能看到自己的倒影,又能看到窗外的风景一样。
但这种设计无法实现远距离成像,又由于缺少复杂的透镜组来调节光路,虚拟图像只能形成在玻璃板后方约2米的位置。驾驶员的眼睛仍然需要在远处的道路和近处的显示信息之间不断调节焦距,而且这块突出在仪表台上的玻璃板,一旦发生碰撞,它很可能会脱落并造成二次伤害。
汽车工程师们开始思考:既然汽车本身就有一块巨大的挡风玻璃,为什么不直接利用它呢?
第二代:W-HUD(风挡式HUD)
这个看似简单的想法,实施起来却充满挑战。挡风玻璃虽然是现成的,但它可不是为显示图像而设计的,它是弧形的、倾斜的,而且每款车的曲率都不相同。如何在这样一个不规则屏幕上投射出清晰、不变形的图像?
答案是自由曲面反射镜技术。通过一种特殊形状的镜子,能够预先矫正图像的变形。眼镜能矫正视力,而这面特殊的镜子能够补偿挡风玻璃造成的光学畸变。
位于仪表台深处的投影单元(PGU)发出图像,经过第一面平面镜改变光路方向,再通过自由曲面镜放大并矫正图像,最后投射到挡风玻璃上。挡风玻璃的内表面就像一面微弱的反射镜,将部分光线反射进驾驶员的眼睛,而大部分光线则透过玻璃,不影响对外界的观察。
这种设计使得虚拟图像的距离延伸到了4-5米,虽然还不能完全与路面融合,但已经大大减少了眼睛的调焦负担。其次,显示区域扩大了3-4倍,不再局限于显示简单的数字,而是能够呈现图形化的导航箭头、来电显示。
第三代:AR-HUD(增强现实HUD)
在介绍AR-HUD之前,你或许已经看到了一个熟悉的概念:增强现实AR。不同于VR(虚拟现实)创造一个完全虚拟的世界,AR是在真实世界的基础上叠加一层数字信息。例如一些手机上的各种AR应用,用手机拍照时可以添加的虚拟贴纸、能看到家具摆放效果的装修软件。虚拟的元素看起来就像真的存在于现实世界中。
AR技术的核心在于两个字:融合。它需要精确地识别现实环境,计算出虚拟物体应该出现的位置、大小和角度,然后将其无缝地嵌入到真实场景中。如果能把这种技术应用在驾驶上,让导航信息不再是抽象的箭头和数字,而是直接画在真实的道路上呢?
但从想法到现实,挑战重重。手机AR只需要处理一块几英寸的屏幕,而汽车AR-HUD要在整个驾驶视野中实现虚实融合。手机可以随时调整角度和距离,而驾驶员的视角是相对固定的。如何让虚拟信息在高速行驶、颠簸路况下依然稳定地贴在道路上?如何确保在强烈阳光下图像依然清晰可见?这些都是AR-HUD必须解决的难题。
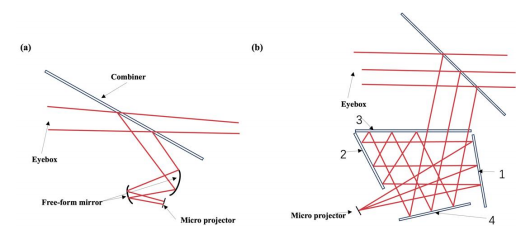
工程师们让光线在系统内部多次反射,像折纸一样把长长的光路折叠起来。一个典型的AR-HUD,其内部光路总长度可能超过1.5米,但通过多次反射,整个系统可以装进一个鞋盒大小的空间。
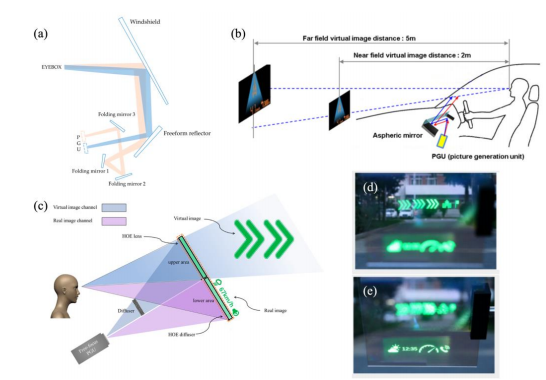
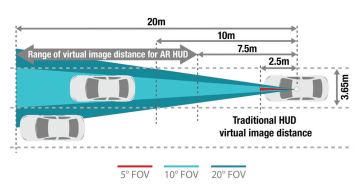
但光路折叠只解决了体积问题,更大的挑战是成像距离。传统HUD的虚像只能投射到5米左右,而AR-HUD需要达到20米甚至更远,不仅要照得更远,光斑还不能散开,图像必须保持清晰。
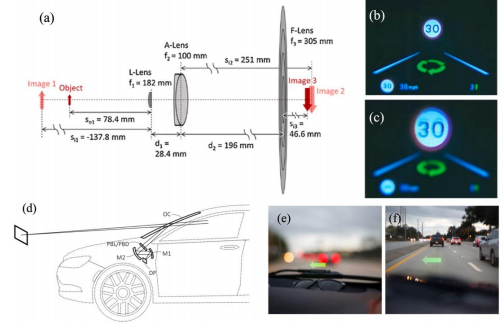
为了实现这个目标,AR-HUD采用了自由曲面反射镜。每一个点的曲率都不相同,能够同时完成三项任务:放大图像、矫正畸变、调整焦距。AR-HUD的放大倍数高达30倍,这也意味着进入系统的阳光也会被放大30倍,工程师们在光学表面镀上特殊的薄膜,它只反射显示所需的特定波长,而让大部分阳光直接透过。同时,系统会根据环境光强度智能调节显示亮度,确保无论是正午的烈日还是夜晚的暗光,图像都清晰可见。
光学系统只是硬件基础,让AR-HUD活起来的是背后的智能算法。系统需要实时获取车辆位置、识别道路环境、计算虚拟图像的准确位置。前视摄像头、毫米波雷达、GPS定位、高精地图……所有传感器的数据在此汇聚,经过每秒上亿次的运算,才能让虚拟的导航线稳稳地贴在真实道路上。
站在技术发展的十字路口,HUD的未来充满无限可能。光波导技术有望将整个系统压缩到一本书的厚度,让每一辆车都能轻松配备;全息投影可能实现真正的3D立体显示,虚拟信息将不再局限于一个平面;而随着自动驾驶技术的成熟,HUD或许会成为人与智能汽车沟通的主要界面,在挡风玻璃上展现一个全新的信息世界。
参考文献
[1] Mike Firth. Introduction to automotive augmented reality head-up displays using TI DLP® technology[R]. Texas Instruments, 2019.
[2] Chen Zhou, Wen Qiao, Jianyu Hua, Linsen Chen. Automotive Augmented Reality Head-Up Displays[J]. Micromachines, 2024, 15(4): 442.
本文为科普中国·创作培育计划扶持作品
出品丨中国科协科普部
监制丨中国科学技术出版社有限公司、北京中科星河文化传媒有限公司
作者丨蔡文垂 中国科学院大学博士研究生
审核丨孙明轩 上海工程技术大学 教授
图文简介